图像的形成¶
Camera Model¶
Pinhole Camera¶
小孔成像原理。孔径越小,成像越清晰,但是光线越暗
Lens Camera¶
透镜成像原理。
Focal Length: 焦距,记作 f
高斯公式:\(\frac{1}{f} = \frac{1}{o} + \frac{1}{i}\)。其中 o 为物距,i 为像距(要投影到光轴上)
Image Magnification¶
光学变焦:焦距越大,成像越大。长焦镜头(焦距大),广角镜头(焦距小)
Field of View (FOV)¶
视场角,广角镜头视场角大,长焦镜头视场角小。还取决于传感器的大小(sensor size)

Aperture¶
光圈,控制进入相机的光线量。光圈越大,进入的光线越多,成像越亮。光圈越小,进入的光线越少,成像越暗。
f-number: 光圈大小的标准,\(N = \frac{f}{D}\),其中 f 为焦距,D 为光圈直径
Lens Defocus¶
失焦,光线不聚焦在传感器上,导致图像模糊。通过调整焦距,使得物体成像在传感器上。
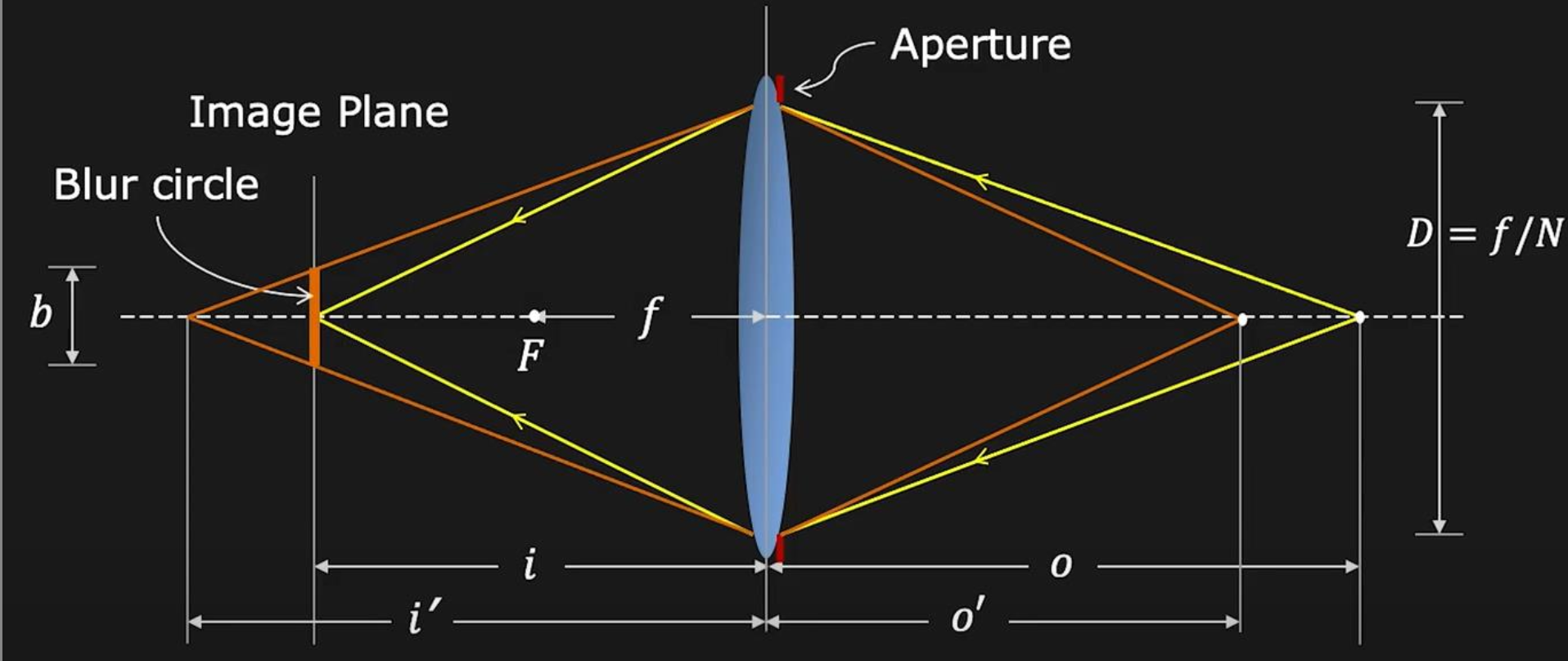
通过调整焦距,使得物体成像在传感器上。
失焦会产生 blur circle,其大小为 \(b = \frac{D}{i'} \cdot |i‘ - i|\),其中 D 为光圈直径,i' 为像距,i 为传感器到透镜的距离。
减小光圈直径,可以减小失焦的影响。
Depth of Field (DOF)¶
景深,物体成像清晰的范围。DOF 受光圈大小、焦距、物距、传感器大小等因素影响。产生原因:传感器是离散的。
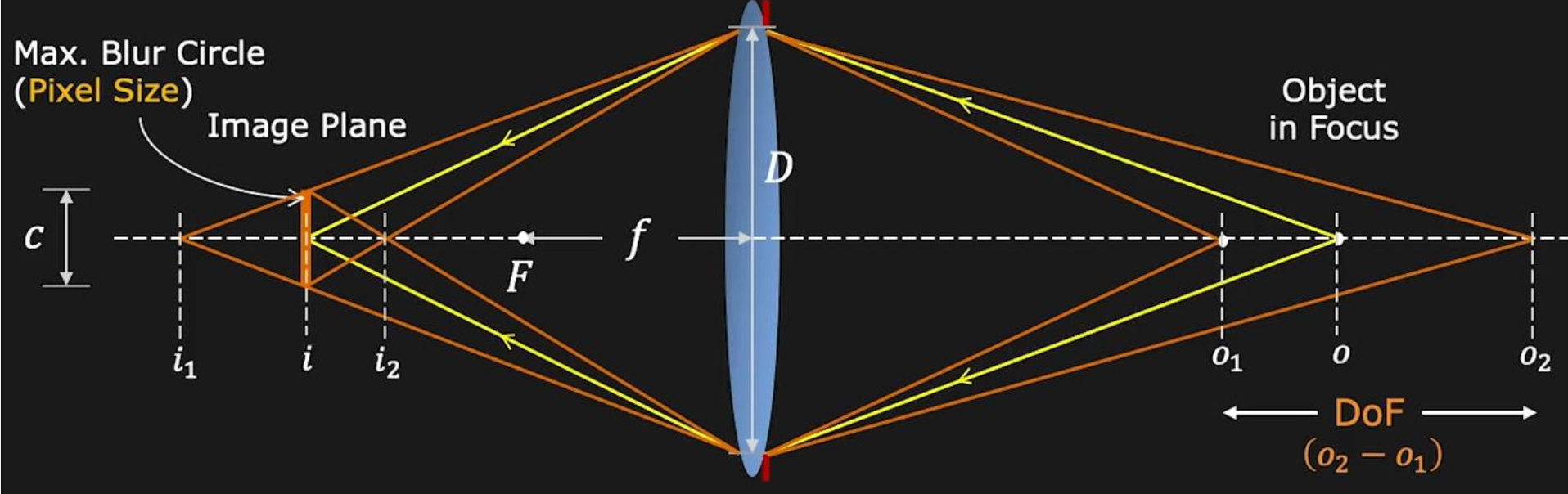
特写:光圈大,焦距小,DOF 小,背景模糊;全景:光圈小,焦距大,DOF 大,背景清晰。
Geometric Image Formation¶
三维到二维的投影过程。
Perspective Projection¶
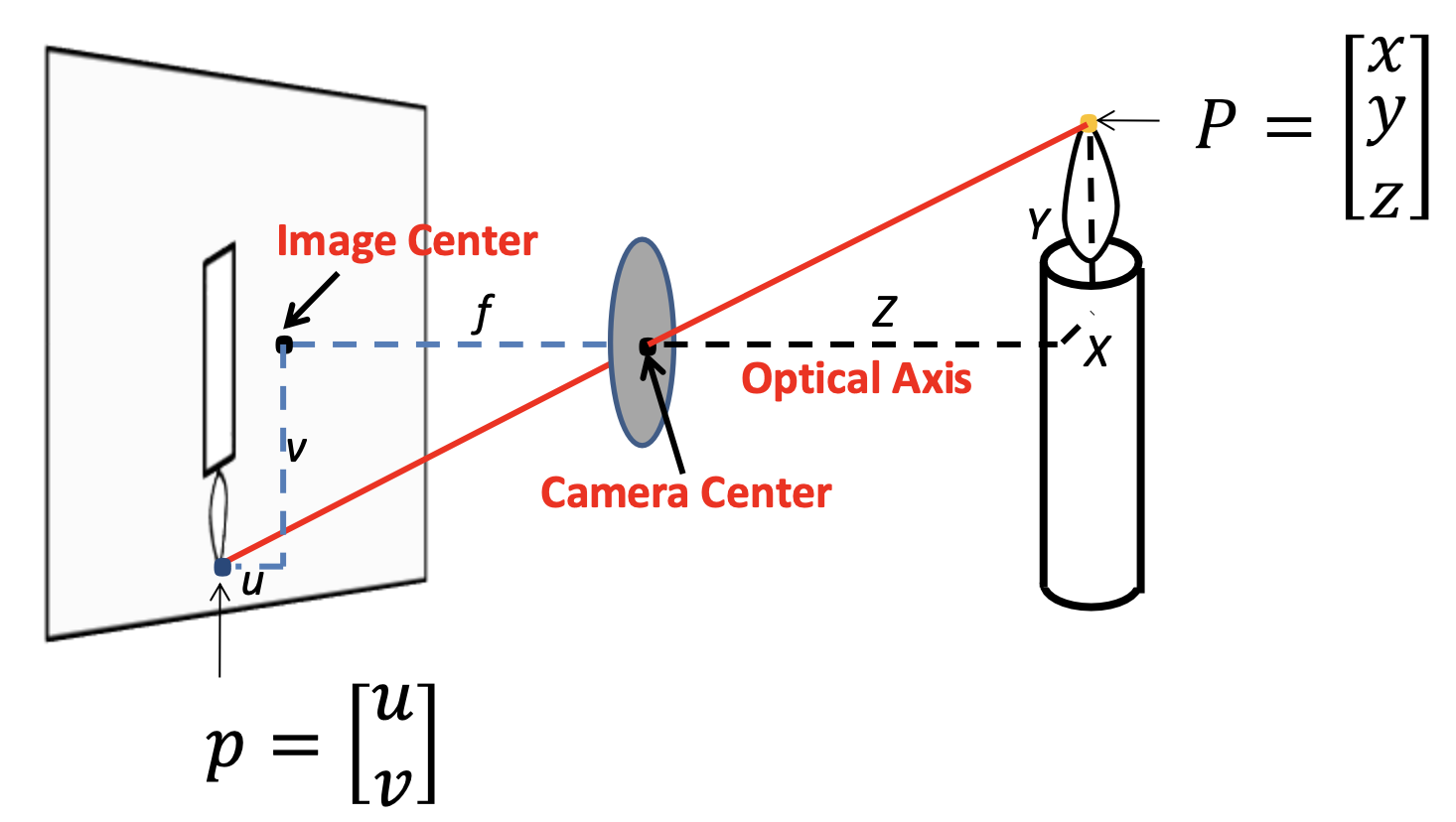
\(u = x \cdot \frac{f}{z}, v = y \cdot \frac{f}{z}\)
Homogeneous Coordinates
Converting to homogeneous coordinates:
Converting from homogeneous to Cartesian:
上面的变换可以写成:
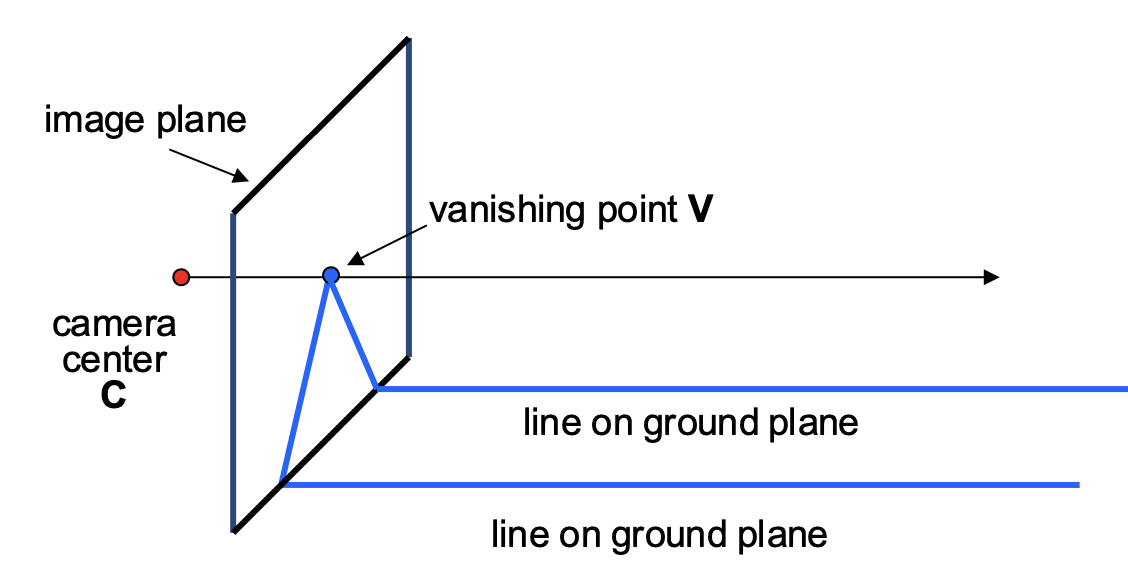
Vanishing Points¶
灭点,平行线在成像平面上的交点。只取决于线的方向。
Vanishing Line¶
灭线,两组平行线的灭点的连线,对应三维空间中的平面,同一平面上的平行线的灭点在同一灭线上。
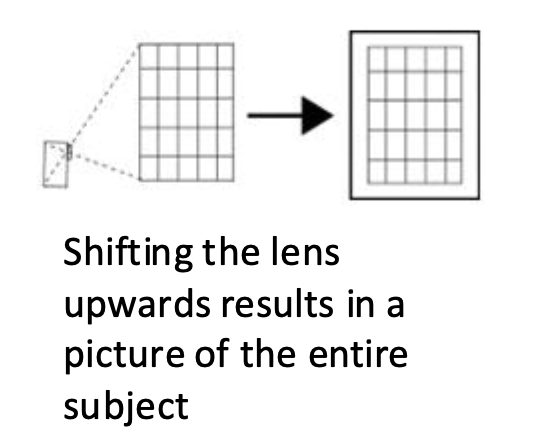
Perspective Distortion¶
畸变,由于透镜的形状和位置,导致图像中的物体形状发生变化。比如两个平行线在图像中不再平行。
轴移相机:透镜和传感器不在同一轴上,消除畸变。
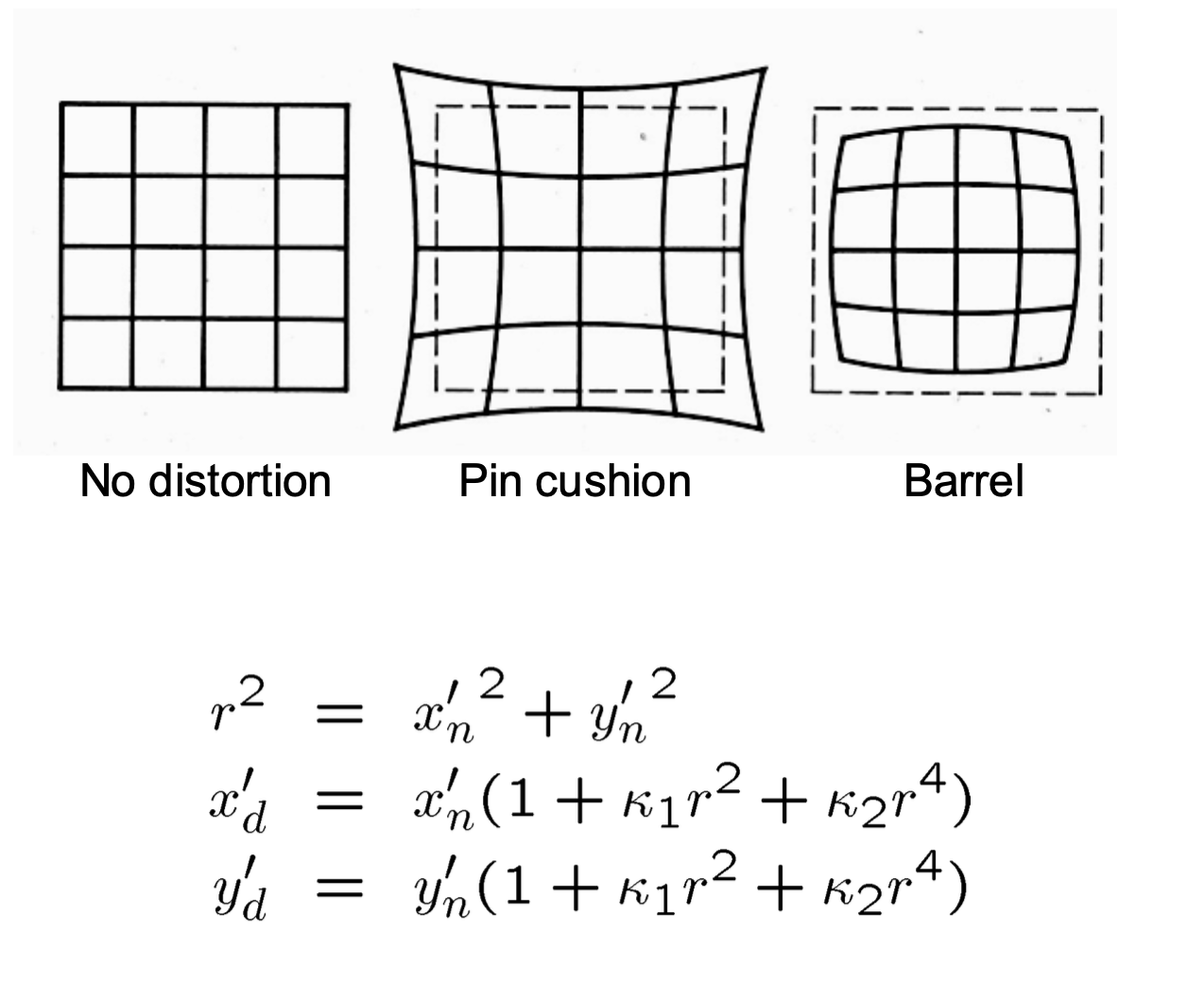
Radial distortion
径向畸变,由于透镜的形状,导致图像中的物体形状发生变化。比如圆形变成椭圆。分为枕形畸变和桶形畸变。
Photometric Image Formation¶
图像的亮度和颜色。
Image Sensor¶
每个 pixel 记录光强和颜色。使用 CMOS 传感器进行光电转换。
Shutter¶
快门,控制光线进入传感器的时间。快门时间(Shutter speed)越长,进入的光线越多,成像越亮。
Rolling Shutter¶
滚动快门,逐行扫描,导致快门时间不同,产生图像畸变。
与之相对的是 Global Shutter,同时扫描所有像素。
Color Sensing¶
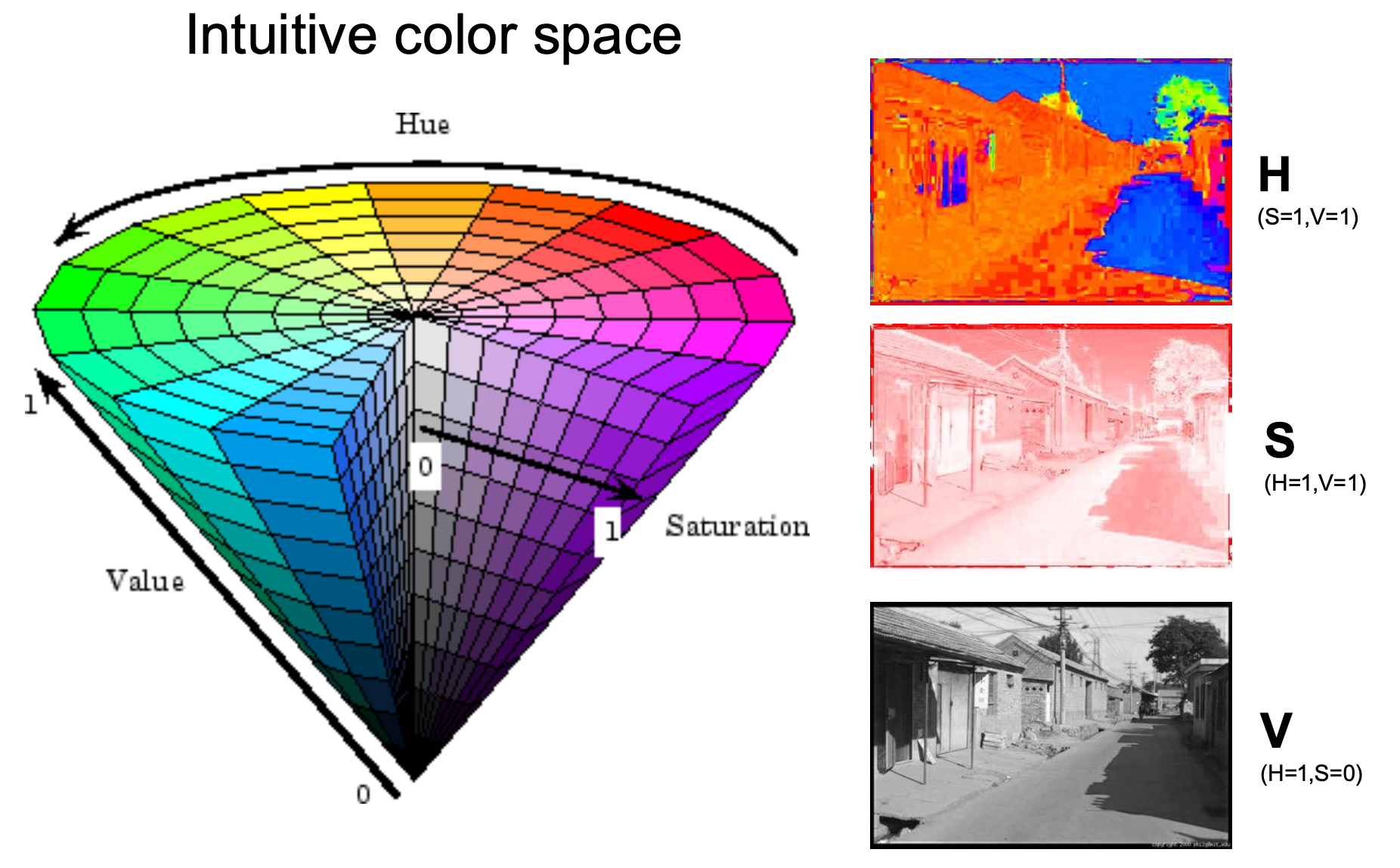
HSV Space¶
Hue(色相)、Saturation(饱和度)、Value(亮度)。
RGB Space¶
用 RGB 表示颜色。每个 pixel 记录三个通道的光强。
Bayer Filter¶
贝尔滤波器,使用 Bayer Filter 进行颜色传感。每个 pixel 只记录一个通道的光强,通过插值得到其他通道的光强。
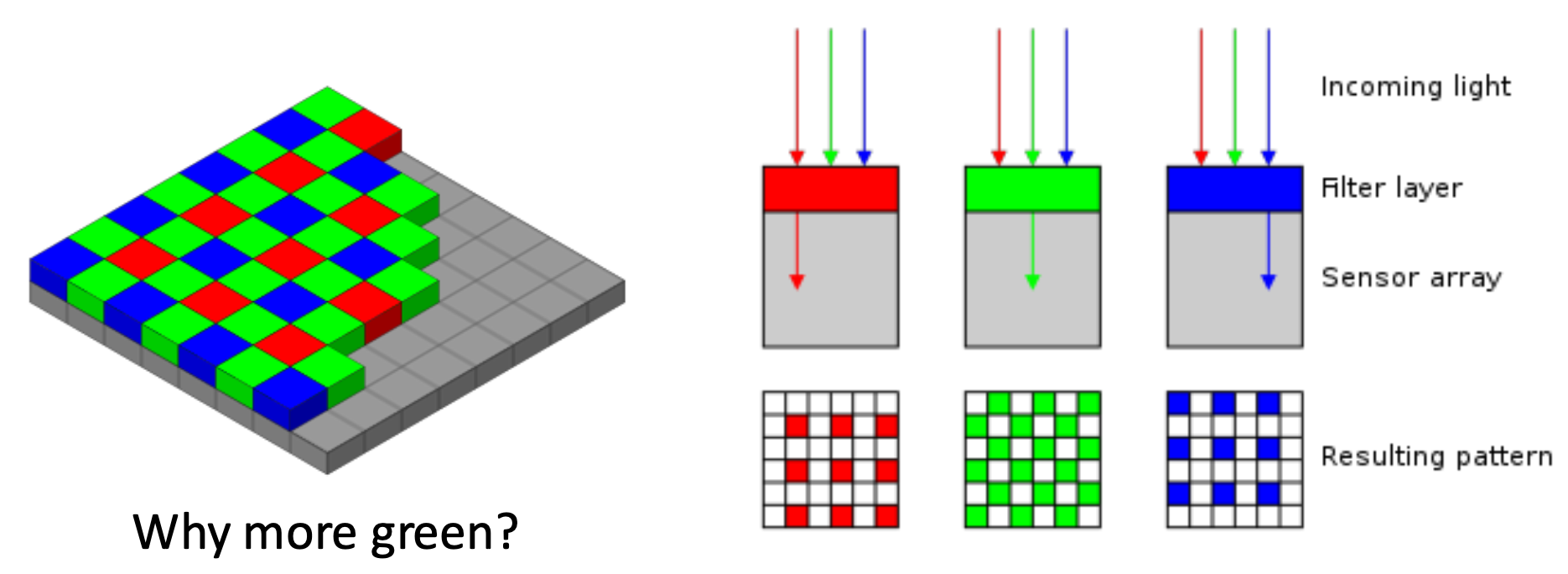
两个绿色通道:人眼对绿色敏感。
Shading¶
着色,根据光源、物体表面、相机位置等因素,计算反射光的颜色。
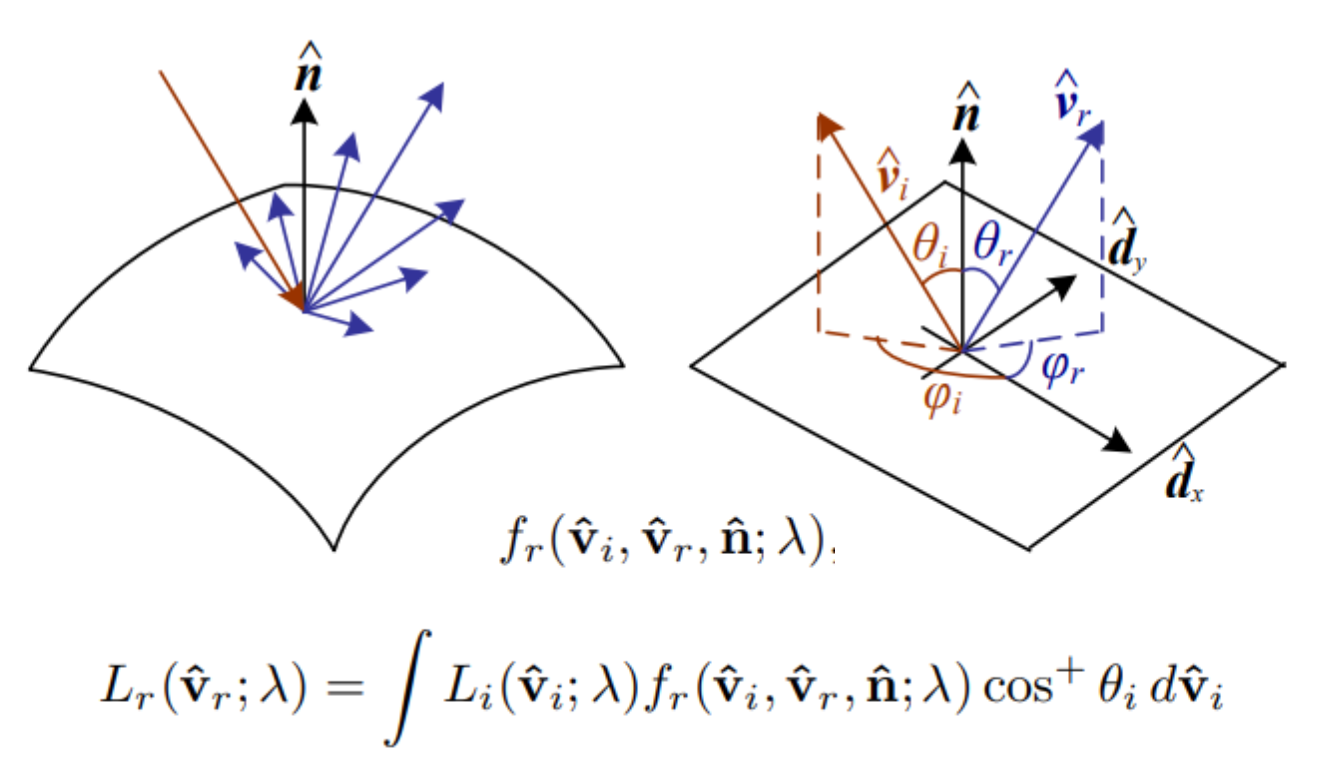
BRDF¶
双向反射分布函数,描述物体表面的反射特性。
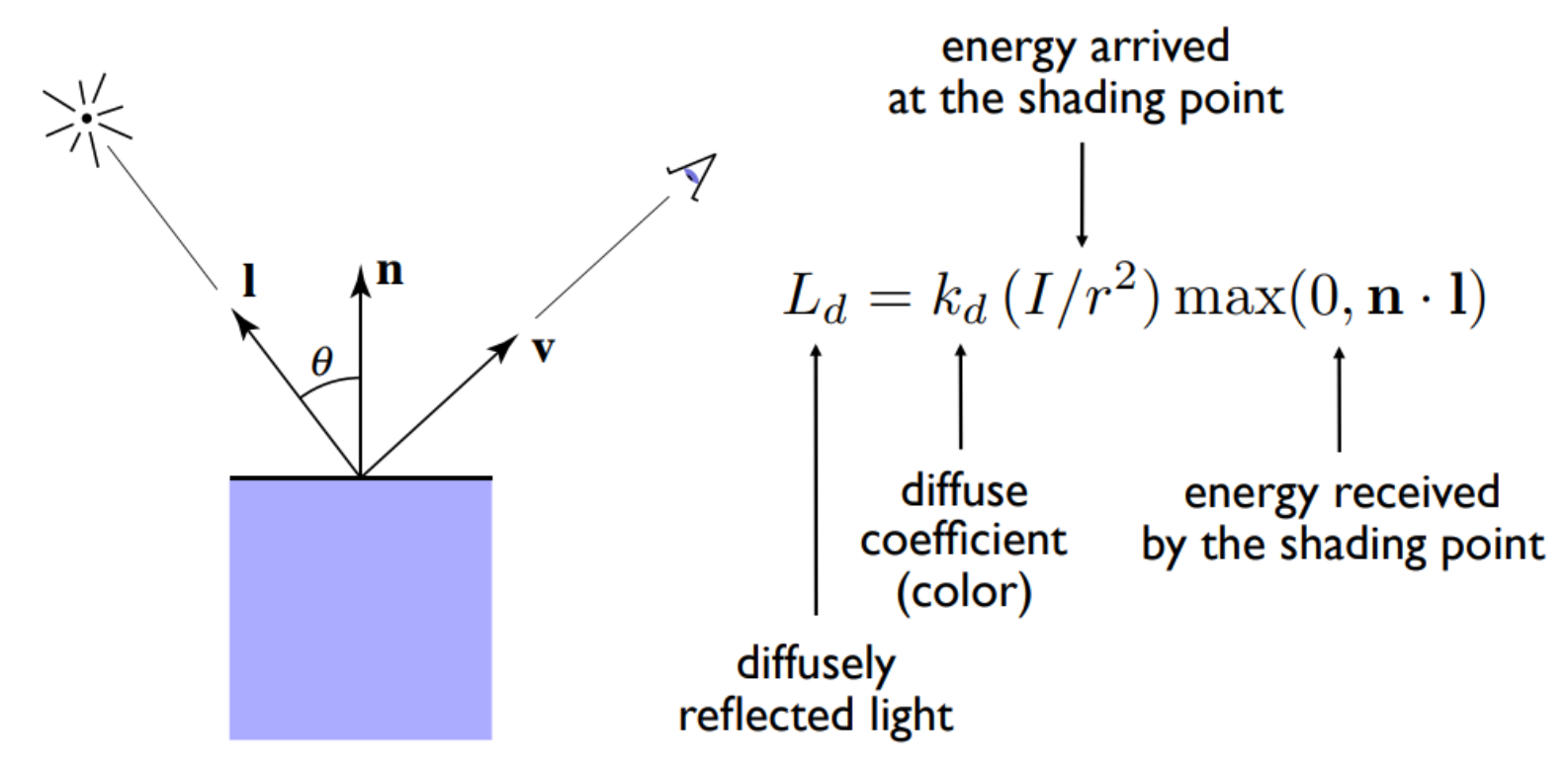
Diffuse Reflection¶
漫反射,光线均匀反射,与观测角度无关。
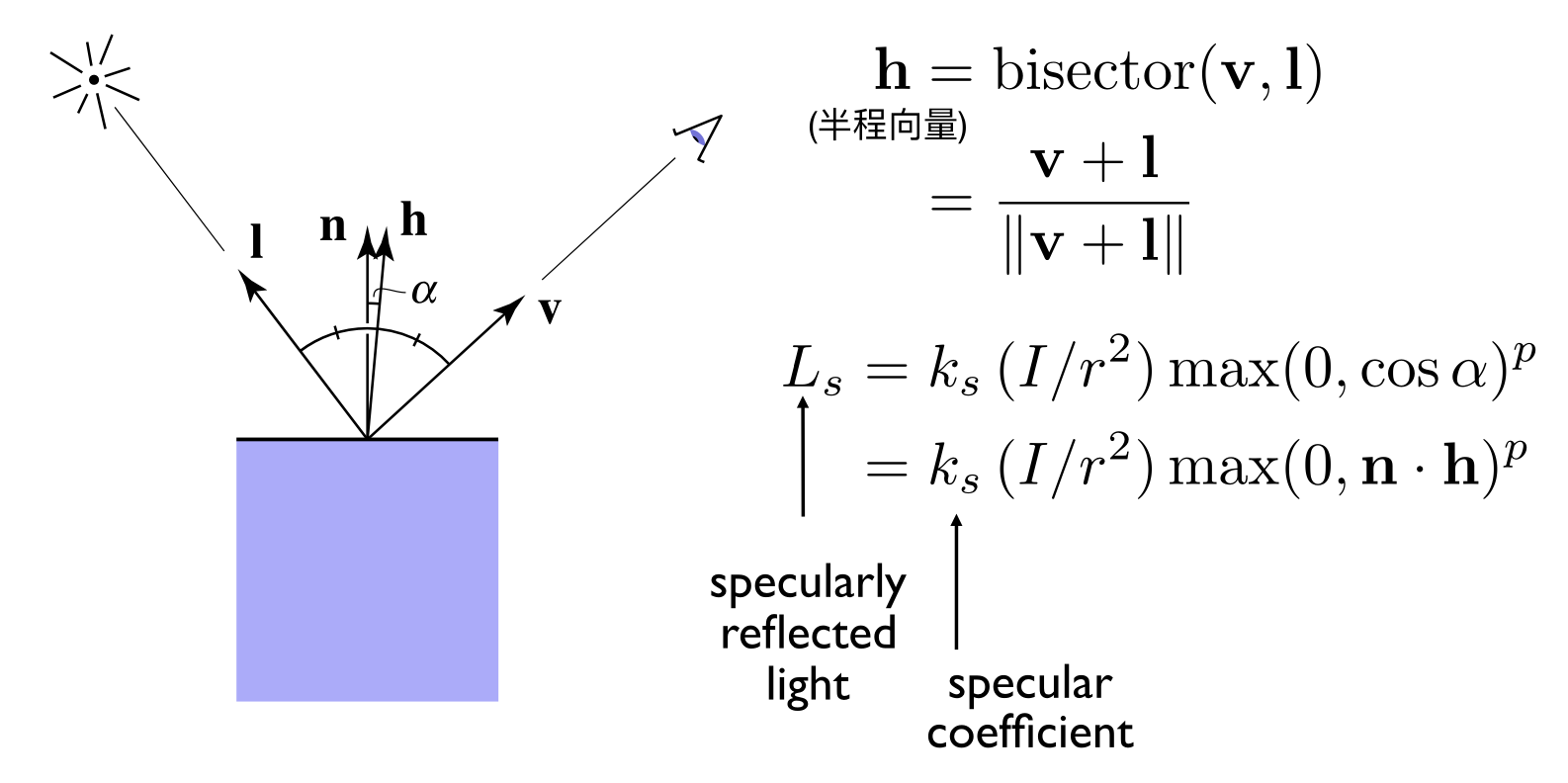
Specular Reflection¶
镜面反射,光线按照反射角度反射,只与观测角度有关。
Ambient Light¶
环境光,和物体表面无关。
\(L_a = k_a \cdot I_a\),其中 \(k_a\) 为环境光系数,\(I_a\) 为环境光强度。
Blinn-Phong Reflection Model¶
Blinn-Phong 反射模型,结合漫反射、镜面反射和环境光,近似表示 BRDF。