lab3 GEMM 通用矩阵乘法
实验步骤
Blocking & Array Packing
基准代码中,按列访问矩阵元素时局部性不高。通过对矩阵进行分块,让每个块中元素在内存中连续排列,可以提高局部性。
使用核函数 BlockCudaKernel 对矩阵 A 和矩阵 B 进行分块并存储在 _a 和 _b 中。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21 | #define _a(_i, _j, _x, _y) \
_a[((_i) * grid_size + (_j)) * block_size * block_size + ((_x) * block_size + (_y))]
#define _b(_i, _j, _x, _y) \
_b[((_i) * grid_size + (_j)) * block_size * block_size + ((_x) * block_size + (_y))]
__global__ void BlockCudaKernel(double *__restrict__ _a,
const double *__restrict__ a,
double *__restrict__ _b,
const double *__restrict__ b)
{
int grid_size = (size + block_size - 1) / block_size;
const int i = blockIdx.x * block_size + threadIdx.x;
const int j = blockIdx.y * block_size + threadIdx.y;
double a_res = 0, b_res = 0;
if (i < size && j < size) {
a_res = a(i, j);
b_res = b(i, j);
}
_a(blockIdx.x, blockIdx.y, threadIdx.x, threadIdx.y) = a_res;
_b(blockIdx.x, blockIdx.y, threadIdx.x, threadIdx.y) = b_res;
}
|
Note
此处将矩阵大小补全为 block_size 的整数倍,方便后续计算。
相应地对 MultipleCudaKernel 核函数进行修改,从分块后的矩阵拿取元素进行计算。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19 | __global__ void MultipleCudaKernel(const double *__restrict__ _a,
const double *__restrict__ _b,
double *__restrict__ result)
{
int grid_size = (size + block_size - 1) / block_size;
const int i = blockIdx.x * block_size + threadIdx.x;
const int j = blockIdx.y * block_size + threadIdx.y;
if (i < size && j < size) {
double res = 0;
for (int idx = 0; idx < gridDim.x; ++idx) {
for (int k = 0; k < block_size &&
k < size - idx * block_size; ++k) {
res += _a(blockIdx.x, idx, threadIdx.x, k) *
_b(idx, blockIdx.y, k, threadIdx.y);
}
}
result(i, j) = res;
}
}
|
核函数调用部分修改:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19 | AdderCudaKernel<<<grid, block>>>(copy_kernel, b_kernel);
CUDA_CALL(cudaDeviceSynchronize());
double *a_block, *copy_block;
CUDA_CALL(cudaMalloc(&a_block, grid_size * grid_size *
block_size * block_size * sizeof(double)));
CUDA_CALL(cudaMalloc(©_block, grid_size * grid_size *
block_size * block_size * sizeof(double)));
BlockCudaKernel<<<grid, block>>>(a_block, a_kernel, copy_block, copy_kernel);
CUDA_CALL(cudaDeviceSynchronize());
// Perform A * B -> Result.
MultipleCudaKernel<<<grid, block>>>(a_block, copy_block, result_kernel);
CUDA_CALL(cudaDeviceSynchronize());
// Swap pointers between A and Result.
double *tmp = a_kernel;
a_kernel = result_kernel;
result_kernel = tmp;
cudaFree(a_block);
cudaFree(copy_block);
|
通过多次调试,采用 block_size = 8 能够达到较快的速度。
运行结果为:
Correct
Custom: 13634.3 milliseconds
cuBLAS: 11508.2 milliseconds
此外,通过数组封装,让矩阵 B 在列方向的子块在内存中连续排列,能够进一步提高局部性。在代码中只需修改 _b 数组的内存排布。
#define _b(_i, _j, _x, _y) \
_b[((_j) * grid_size + (_i)) * block_size * block_size + ((_y) * block_size + (_x))]
Shared Memory & Cooperative Fetching
计算目标矩阵 C 时,每一个线程块计算矩阵 C 的一个子块,有 \(C_{ij}=\sum _{k=0}^{N-1}A_{ik}B_{kj}\) 。
上面的做法中,每次都需要从 global memory 中拿取矩阵 A 和 B 中的元素,速度较慢。
在计算之前,将 \(A_{ik}\) 和 \(B_{kj}\) 放入 shared memory 中,计算时只需从 shared memory 中拿取元素,从而降低访存延迟。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34 | #define a_shared(_x, _y) a_shared[(_x) * block_size + (_y)]
#define b_shared(_x, _y) b_shared[(_x) * block_size + (_y)]
/// \brief Do Matrix Multiplication on GPU.
__global__ void MultipleCudaKernel(const double *__restrict__ _a,
const double *__restrict__ _b,
double *__restrict__ result)
{
int grid_size = (size + block_size - 1) / block_size;
__shared__ double a_shared[block_size * block_size];
__shared__ double b_shared[block_size * block_size];
const int i = blockIdx.x * block_size + threadIdx.x;
const int j = blockIdx.y * block_size + threadIdx.y;
const int x = threadIdx.x;
const int y = threadIdx.y;
double res = 0;
for (int idx = 0; idx < gridDim.x; ++idx) {
// Load matrix to shared memory
a_shared(x, y) = _a(blockIdx.x, idx, x, y);
b_shared(x, y) = _b(idx, blockIdx.y, x, y);
__syncthreads();
for (int k = 0; k < block_size; ++k) {
res += a_shared(x, k) * b_shared(k, y);
}
__syncthreads();
}
if (i < size && j < size) {
result(i, j) = res;
}
}
|
运行结果为:
Correct
Custom: 17235.6 milliseconds
cuBLAS: 11489.1 milliseconds
性能有所下滑,推测是因为 bank conflict 较多,导致访存效率较低。
Bank Conflict
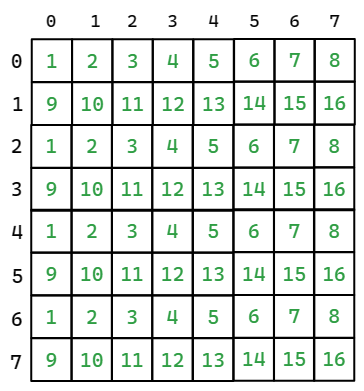
假设存储器有 16 个 bank ,且连续的 16 个矩阵元素被分别存储到 16 个 bank 中。
当每行元素在内存中连续时,bank 的分配如下图(其中绿色数字为元素所在 bank 编号),
若 a_shared 采用如上的数据排布,则每个线程块对 a_shared 的访问如下图。
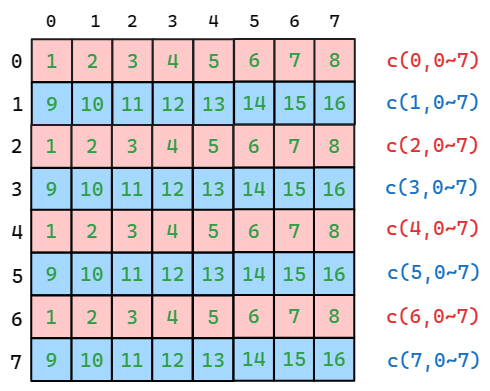
由于计算 c(x, 0~7) 时各个线程均访问相同的地址,通过广播则不会产生 bank conflict 。故主要产生 bank conflict 的原因是不同行的线程访问了同一 bank 的不同位置。
通过对内存进行重新配布,使得每一列的元素在内存中连续。如图,此时不同行的线程不会产生 bank conflict 。
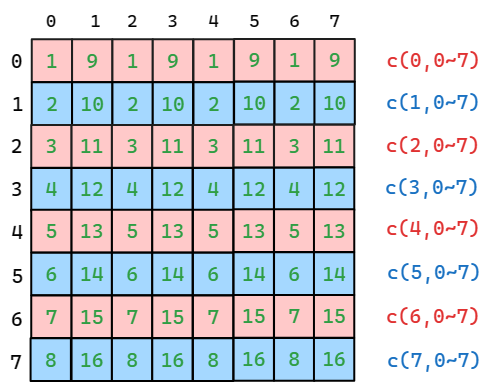
对于 b_shared 矩阵,同理可知让其每行元素在内存中连续,即可避免 bank conflict 。
代码中只需改动 a_shared 数组的内存分布:
#define a_shared(_x, _y) a_shared[(_y) * block_size + (_x)]
运行结果:
Correct
Custom: 11333.5 milliseconds
cuBLAS: 11484.9 milliseconds
以上部分的代码在 /code/baseline.cu 中,编译参数位于 /code/Makefile ,运行参数为
srun -p 2080Ti -N 1 -n 1 --cpus-per-task=8 --gpus=1 gemm
Tensor Core
使用 nvcuda::wmma 中的 Tensor Core API 调用 Tensor Core 进行矩阵乘法。
由于对于数据类型 double ,只提供了 8x8x4 的 Matrix Size ,故分块计算时,将 8x8x8 的矩阵乘法拆分成两次 8x8x4 的矩阵乘法,调用 Tensor Core 进行计算。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54 | #define a_shared(_x, _y) a_shared[(_y) * block_size + (_x)]
#define b_shared(_x, _y) b_shared[(_x) * block_size + (_y)]
#define c_shared(_x, _y) c_shared[(_x) * block_size + (_y)]
/// \brief Do Matrix Multiplication on GPU.
__global__ void MultipleCudaKernel(const double *__restrict__ _a,
const double *__restrict__ _b,
double *__restrict__ result)
{
int grid_size = (size + block_size - 1) / block_size;
__shared__ double a_shared[block_size * block_size];
__shared__ double b_shared[block_size * block_size];
__shared__ double c_shared[block_size * block_size];
wmma::fragment<wmma::matrix_a, block_size, block_size,
block_size / 2, double, wmma::col_major> a_frag;
wmma::fragment<wmma::matrix_b, block_size, block_size,
block_size / 2, double, wmma::row_major> b_frag;
wmma::fragment<wmma::accumulator, block_size, block_size,
block_size / 2, double> c_frag;
const int i = blockIdx.x * block_size + threadIdx.x;
const int j = blockIdx.y * block_size + threadIdx.y;
const int x = threadIdx.x;
const int y = threadIdx.y;
wmma::fill_fragment(c_frag, 0.0f);
for (int idx = 0; idx < gridDim.x; ++idx) {
a_shared(x, y) = _a(blockIdx.x, idx, x, y);
b_shared(x, y) = _b(idx, blockIdx.y, x, y);
__syncthreads();
wmma::load_matrix_sync(a_frag, a_shared, block_size);
wmma::load_matrix_sync(b_frag, b_shared, block_size);
wmma::mma_sync(c_frag, a_frag, b_frag, c_frag);
wmma::load_matrix_sync(a_frag,
a_shared + block_size * block_size / 2, block_size);
wmma::load_matrix_sync(b_frag,
b_shared + block_size * block_size / 2, block_size);
wmma::mma_sync(c_frag, a_frag, b_frag, c_frag);
__syncthreads();
}
wmma::store_matrix_sync(c_shared, c_frag,
block_size, wmma::mem_row_major);
__syncthreads();
if (i < size && j < size) {
result(i, j) = c_shared(x, y);
}
}
|
运行结果为:
Correct
Custom: 2127.59 milliseconds
cuBLAS: 899.045 milliseconds
Bonus 部分代码位于 /code_tensor/baseline.cu 中,编译参数位于 /code_tensor/Makefile 中,运行参数为:
srun -p A100 -N 1 -n 1 --cpus-per-task=8 --gpus=1 ./gemm
Reference