Checkmate¶
Checkpoint Strategy¶
论文链接:Training Deep Nets with Sublinear Memory Cost
用时间换空间。将计算图分成 k 段,保存每段的输出,丢弃中间结果,反向传播时重新进行前向计算,再次得到中间结果。空间复杂度 \(O(n/k) + O(k)\),取 \(k = \sqrt{n}\) 得 \(O(\sqrt{n})\)。
Checkmate¶
论文链接:Checkmate: Breaking the Memory Wall with Optimal Tensor Rematerialization
Introduction¶
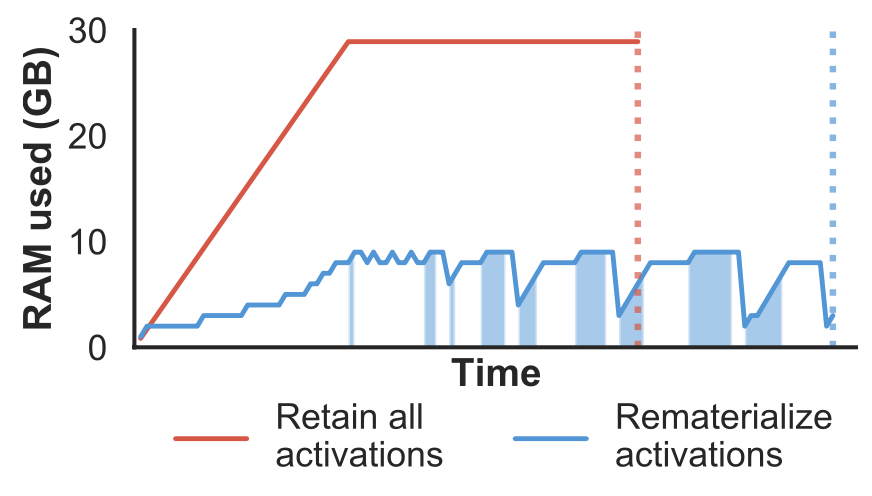
深度学习训练过程需要大量的高带宽内存来存储中间激活值(activation tensors)。为了降低内存开销,已有的解决方案是通过丢弃部分 tensor,不存储进 RAM,在反向传播时重新计算这些 tensor(rematerialization)。然而现有的 rematerialization 方法是启发式的,并且只适用于 linear graph 或 path graph,无法处理非线性的 DNN 结构。
Checkmate 提出了一种基于 MILP(Mixed Integer Linear Programming 混合整数线性规划)的最优 rematerialization 方法,能够处理任意 DNN 网络结构。Checkmate 将 tensor rematerialization 问题建模为一个约束优化问题(constrained optimization problem),使用 gurobi 作为求解器,能够在合理的时间内找到最优解。
Motivation¶
提到 TensorFlow 和 PyTorch 都保存了所有的中间激活值(activation tensors),导致了巨大的内存开销。引入 rematerialization 策略能够显著降低内存使用。
大多数 prior work 都假设网络有线性的计算图,比如 Training Deep Nets with Sublinear Memory Cost,线性图假设限制了算法的适用性。除此之外,prior work 还假设每一层进行 recompute 的代价都是相同的,但是对于部分架构,比如 VGG19,最复杂的层的计算代价可能远高于其他层。
Checkmate 对网络几乎没有任何假设,允许
- 每个节点有任意多个输入和输出
- 每层的内存成本可以不同
- 每层的计算成本可以不同
仅需要节点的依赖关系在评估之前被确定,且在执行期间的任意时间点,需驻留在内存中的 tensor 必须可放入 RAM。
Related Work¶
Checkpointing and rematerialization¶
Prior work 聚焦在理想情况下的线性 n 层网络的分段方式,使用简单的启发式方法来选择 checkpoint 的位置,然而实际情况中 DNN 每层的内存使用量和计算成本差异很大,导致启发式方法的效果不佳。另外有工作还提出了使用 DP 和分治的方法来优化 checkpoint 的选择。
另外还跟寄存器分配问题进行了类比,寄存器数量不足时,编译器可以将部分变量溢出存储到内存中,也可以舍弃部分变量,在需要时重新计算,编译器会在两种方法之间进行权衡。而 LLM 训练中,中间变量规模远大于传统的寄存器规模,将变量溢出存储到 RAM 的成本很大,因此,对中间激活值进行重新计算更为合适。
Reversible Networks¶
Gomez 等人提出了一种可逆(近似可逆)残差深度神经网络(DNN)架构,其中中间临时值可以根据标准前向计算得出的值重新计算。这种可逆性使得在反向传播时可以重新计算中间激活值,从而降低内存使用。相比之下,Rematerialization 可以节省更多成本,但可逆网络可以作为一种补充方法,适用于特定的网络架构和任务。
Distributed computation¶
分布式内存计算和梯度累积两种方法和 rematerialization 方法正交,能够在不同的层面上优化内存使用。然而,分布式内存计算(模型并行)需要访问额外的设备,以及需要快速的通信网络支持;梯度累积则会降低性能,在小批量训练下效果不佳。
Activation compression¶
在某些 DNN 训练中,在不损失太多精度的前提下,可以对部分数据进行压缩,比如处理数据集中的原始图像、对激活值进行量化等。这些方法可以有效降低内存使用,但会造成精度损失。Checkmate 则不会影响模型精度。
Optimal Rematerialization¶
将 Rematerialization 问题建模为 mixed integer linear program (MILP) 问题。
Problem definition¶
计算图 \(G=(V, E)\) 为包含 \(n\) 个节点 \(V=\{v_1, \dots, v_n\}\) 的有向无环图,其中每个节点表示产生值(例如中间激活值)的运算。\(E\) 表示运算之间的依赖关系。节点按拓扑序编号,使得运算 \(v_j\) 仅依赖运算 \(v_{i<j}\)。
每个运算的结果(输出)需要 \(M_v\) 的内存来存储,使用其输入对输出进行重新计算需要 \(C_v\) 的成本。目标是在内存预算 \(M_{\text{budget}}\) 下,最大化内存使用,最小化计算成本。
Representing a schedule¶
具体的 schedule 策略表示为每个节点保存在内存中或者进行重计算。将网络划分为 \(T\) 个阶段,每个阶段只允许一个节点重计算一次,定义:
- \(S_{t, i} \in \{0, 1\}\) 表示运算 \(i\) 的结果从阶段 \(t - 1\) 直到阶段 \(t\) 都被保存在内存中。
- \(R_{t, i} \in \{0, 1\}\) 表示运算 \(i\) 在阶段 \(t\) 进行重计算。
令 \(T = n\)。
Scheduling with ample memory¶
即使内存充足,仍需要保证运算在被重新计算时,其所有依赖都可用。优化问题:
- (1a):优化目标,最小化计算成本。
- (1b):若运算 \(j\) 在阶段 \(t\) 被重新计算,则其所有依赖 \(i\) 必须在阶段 \(t\) 可用(要么被重新计算,要么保存在内存中)。
- (1c):若运算 \(i\) 在阶段 \(t-1\) 到阶段 \(t\) 期间被保存在内存中,则运算 \(i\) 要么在阶段 \(t-1\) 被重新计算,要么在阶段 \(t-1\) 及之前已经保存在内存中。
- (1d):初始阶段不保存任何运算结果。
- (1e):最终的运算必须在某个阶段被计算,确保训练过程的完整性。
- (1f):决策变量 \(R, S\) 的定义。
Constraining memory utilization¶
引入变量 \(U_{t, k} \in \mathbb{R}_+\),表示在阶段 \(t\) 中,运算 \(v_k\) 完成时所使用的内存。引入变量 \(\text{FREE}_{t, i, k} \in \{0, 1\}, (v_i, v_k) \in E\),表示在阶段 \(t\) 中,运算 \(v_k\) 完成后,是否可以释放运算 \(v_i\) 占用的内存。
两个假设:
- 网络的输入和参数一直驻留在内存中。
- 有足够的空间存放参数梯度,参数梯度所占内存和参数所占内存相同。
- 在阶段开始时,所有 checkpointed value 都驻留在内存中。
递归定义 \(U_{t, k}\):
即每个阶段开始前,所用内存为:输入所占内存、参数和参数梯度所占内存、以及所有前一阶段保存在 checkpoint 中的运算结果所占内存之和。
在计算节点 \(v_{k+1}\) 前,\(v_k\) 及其依赖节点若以后不再使用,则可以释放其占用的内存。则递归定义为
\(\text{mem_freed}_t(v_k)\) 表示在阶段 \(t\) 中,运算 \(v_k\) 完成后,节点 \(v_k\) 及其依赖可被释放的内存。令
则
式(5)确保:当 \(v_i\) 需要驻留在内存中时,不对其进行释放;当当前阶段存在 \(v_i\) 的子节点需要重计算时,不释放 \(v_i\) 的内存;当 \(v_k\) 不进行重计算时,不能保证 \(v_i\) 能被释放,由于每个阶段只有一个节点进行重计算,所以也保证了不会重复释放内存。
Linear reformulation of memory constraint¶
由于 \(\text{FREE}\) 的表达式不是线性的,不能放入 ILP 模型中,需要将其变换成线性形式。引入两个引理
Lemma 4.1 Linear Reformulation of Binary Polynomial
若 \(x_1, \dots, x_n \in \{0, 1\}\),则
Lemma 4.2 Linear Reformulation of Indicator Constraints
整数 \(y\),存在常量上界 \(\kappa\),即 \(0 \leq y \leq \kappa\),则
当且仅当 \(x \in \{0, 1\}, (1 - x) \leq y \leq \kappa(1 - x)\) 时成立。
令 \(\text{num_hazards}(t, i, k)\) 表示约束 (5) 中右侧为零的因子个数,则有
应用 Lemma 4.1 得
设 \(\kappa\) 为 \(\text{num_hazards}(t, i, k)\) 的上界,应用 Lemma 4.2 得
Tractability via frontier-advancing stages¶
给定计算图的一个执行顺序(拓扑序),将节点划分为 frontier-advancing stages,使得 \(v_i\) 在阶段 \(i\) 中首次被求值。用约束 (8a-8c) 替换 (1d, 1e):
其中:
- (8a) 确保每个节点在其对应的阶段被计算。
- (8b, 8c) 确保节点 \(v_i\) 在阶段 \(i\) 之前未被计算过。
这种约束更加严格,减少了可行集的大小,限制了搜索空间,缩短运行时间。
Complete Integer Linear Program formulation¶
完整的 MILP:
Constraints implied by optimality¶
注意到 \(\text{FREE}_{t, k, k} = 1\) 当且仅当 \(v_k\) 被计算后没有被使用,那么直接不计算 \(v_k\) 也是可行的,即 \(R_{t, k} = 0\)。因此直接固定 \(\text{FREE}_{t, k, k} = 0\),此时式 (4) 可以改为
这样减少了 \(|V|^2\) 个变量。
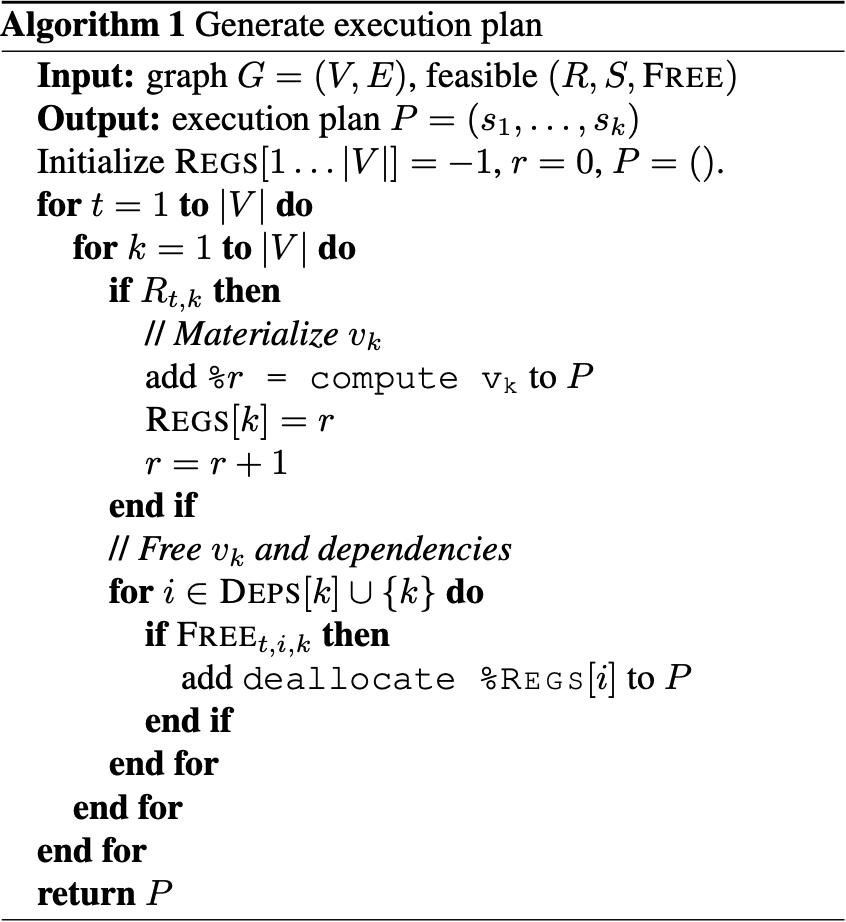
Generating an execution plan¶
根据计算图 \(G=(V, E)\) 和 MILP 的解 \((R, S, FREE)\),生成执行计划 \(P=(s_1, \dots, s_k)\),其中 \(s_i\) 代表计算操作或者释放内存。
Cost model¶
计算成本 \(C\) 在构建 MILP 之前确定,方法是在目标硬件上使用一系列随机输入对网络层进行性能分析。并且由于输入和输出大小已知,计算图中每个值的内存消耗都可以静态计算,计算出的内存消耗 \(M\) 用于构建内存约束。
Approximation¶
由于求解 ILP 是 NP-hard 的,对于大规模的神经网络,对 ILP 进行精确求解不可能。论文采用的方法是:
- 先采用在多项式时间内生成分数解的线性规划
- 采用两阶段舍入算法:利用分数解先舍入一部分变量为整数解,再计算剩余变量的最优解。
Relaxing integrality constraints¶
通过放宽变量的取值范围,将整数约束转化为线性约束,从而可以在多项式时间内求解,即令 \(R, S, FREE \in [0, 1]\)。
求得分数解 \(R^*, S^*\) 之后,可以使用随机舍入或者确定性舍入得出整数解。但是直接舍入后可能导致解违反了约束条件。
A two-phase rounding strategy¶
采用两阶段舍入策略:
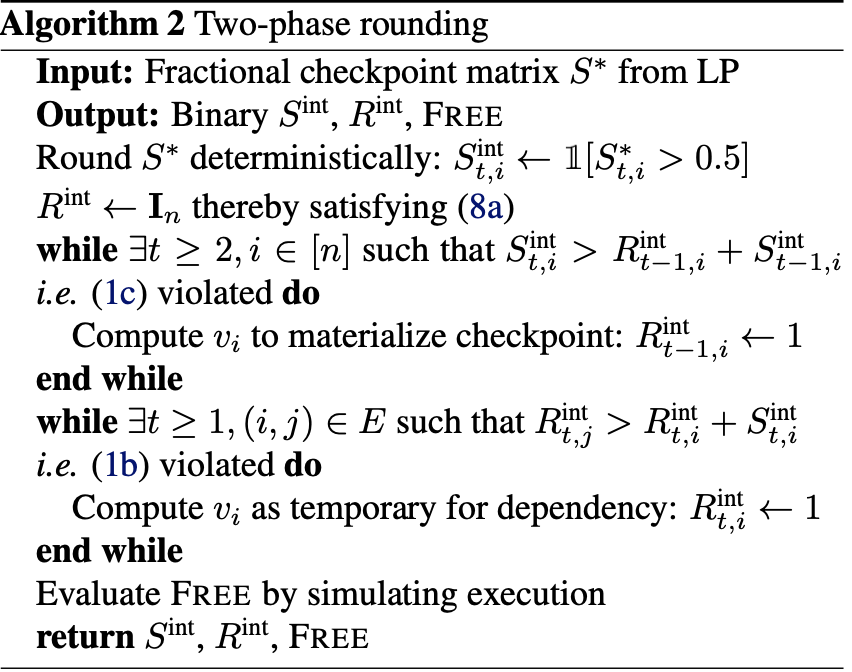
Memory budget feasibility¶
算法 2 满足了条件 (1b, 1c, 1f, 8a),但是可能不满足内存约束。解决方法是在求解 ILP 时,令 \(U_{t, k} \leq (1 - \epsilon)M_{\text{budget}}\),预留总内存预算的余量。
Evaluation¶
研究以下问题:
- 使用重计算策略时,如何权衡内存占用和计算开销之间的关系?
- 使用重计算策略处理大规模输入是否可行?
- 如何才能逼近最优重计算策略?
将 checkmate 和启发式算法 baseline 进行对比,在所有内存预算下,最优重计算都能显著降低 baseline 的计算开销,并实现比以往更低的内存占用。
Baselines and generalizations¶
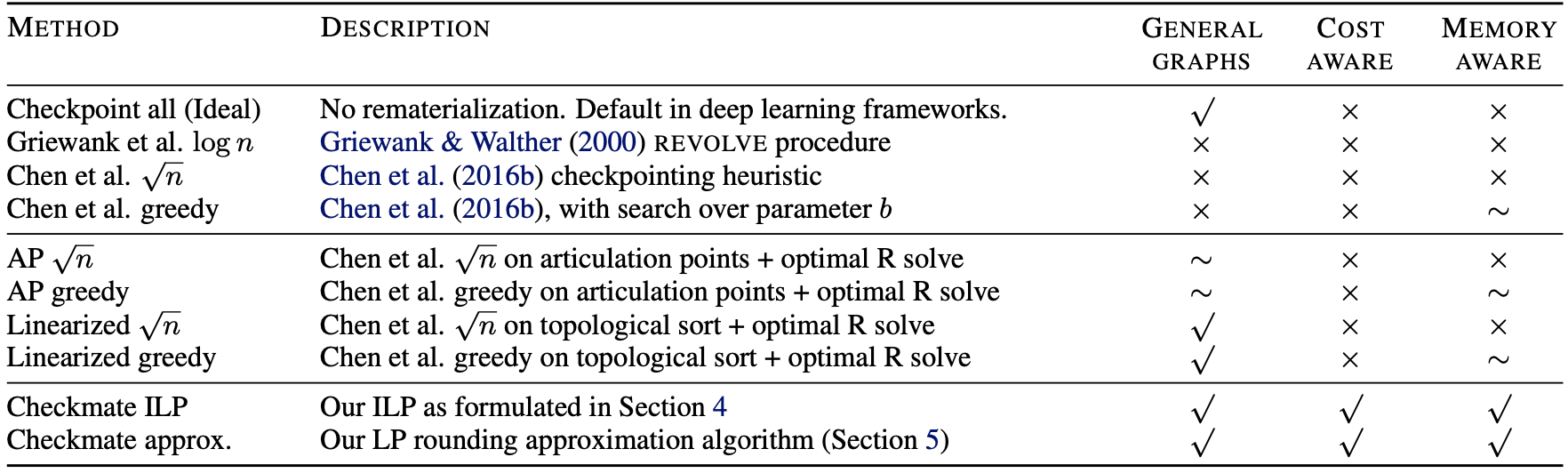
理想情况下(内存够用),Checkpoint all 保存所有中间结果,不进行重计算。
线性图中,可以直接使用 Griewank 等人提出的 \(\log n\) 算法和 Chen 等人提出的 \(\sqrt{n}\) 启发式算法和贪心算法。
对于非线性图,对 \(\sqrt{n}\) 启发式算法和贪心算法进行扩展,扩展得到 AP \(\sqrt{n}\) 算法、AP 贪心算法、线性化 \(\sqrt{n}\) 算法和线性化贪心算法。
Evaluation setup¶
Checkmate 使用 TensorFlow 实现,接受 Keras 模型作为输入。提取正向和反向计算图,使用 Gurobi 求解器求解优化问题 (9)。最后生成执行计划,构建静态训练图。
What is the trade-off between memory usage and computational overhead?¶
Checkmate 线性网络(VGG16、MobileNet)上以最低的计算成本生成内存限制内的解决方案,并显著降低复杂架构(U-Net)上的内存消耗和计算成本。
Are large inputs practical with rematerialization?¶
为 ILP 问题加入变量 \(B\) 表示 batchsize,添加约束再次求解,得出最大 batchsize。经过测试,checkmate 的最大 batchsize 在 U-Net、FCN8、SegNet、VGG19、ResNet50、MobileNet 几种模型中均高于 baseline,在部分模型(U-Net、MoblieNet)上提升显著。
How well can we approximate the optimal rematerialization policy?¶
测量了近似解与最优解的计算开销的比值,即最优解相对于近似解的加速比。对于所有测试模型,加速比最多为 \(1.06\times\),说明近似解已经很接近最优解。
CONCLUSION¶
本文提出的 Checkmate 重计算策略,允许在有限的内存上训练大型神经网络。并且不需要对神经网络结构作出强假设,能够支持残差网络等复杂结构,并通过一个硬件感知、基于配置文件的 cost model 来评估整个计算图中非均匀内存使用和计算成本的影响。最佳的重计算策略在各种内存限制下都具有最小的计算开销,并且基于 Checkmate 能够训练具有显著更大批量大小的高分辨率模型。此外,论文还提出了一个两阶段舍入策略对 ILP 的最优解进行了近似,能够在多项式时间内获得接近最优的解。